Dexterous Workspace And Reachable Workspace. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. (eds) advances in robot kinematics. (2006) quantitative dexterous workspace comparisons. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Given x find q=( 1 , 2 , 3 ). Dexterity changes as it travels through its reachable. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Next, the physical meanings of this singular point will be also investigated. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Workspace of both serial and parallel manipulators. Reachable workspace and the singularity of the mechanism with the second set of parameters. Observing that cuboid workspaces are desirable for article keywords: The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method.
Dexterous Workspace And Reachable Workspace , Our Shared Workspaces Include Hot Desks And Dedicated Desks, With Flexible Agreements And Premium Amenities.
Cross Section Of Both Reachable And Dexterous Workspaces When Defined Download Scientific Diagram. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Given x find q=( 1 , 2 , 3 ). (eds) advances in robot kinematics. Reachable workspace and the singularity of the mechanism with the second set of parameters. Observing that cuboid workspaces are desirable for article keywords: Workspace of both serial and parallel manipulators. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). (2006) quantitative dexterous workspace comparisons. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Next, the physical meanings of this singular point will be also investigated. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Dexterity changes as it travels through its reachable.
With flexible work options and alternative working arrangements becoming more popular, new and different ideas continue to sprout and take hold.
Although p4v can connect to the server using only host name and port, a workspace is required to work with files that the helix server manages. Given x find q=( 1 , 2 , 3 ). However, in the reachable workspace, the manipulator's operational capacity is limited because the terminal device can only be placed in a restricted range of orientations. Reachable workspace is the area which the manipulator can reach with at least one orientation. R/workspaces is the best place to share your desk or office. There are many researches investigating the effects of geometric parameters on dexterity, workspace, and singularity. You can create multiple workspaces, which act like virtual desktops. Dexterity and workspace are the most important criteria for optimal designs of parallel manipulators. The kinematics of the example seen before are:. The method is based in computing the intersection of the reference manipulator workspace and the reachable/dexterous figure of the other. A robot's workspace is the total volume swept out by the end effector as the manipulator executes all possible motions. Our shared workspaces include hot desks and dedicated desks, with flexible agreements and premium amenities. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Github is home to over 40 million developers working together to host and review code, manage projects, and build software together. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Workspaces are meant to reduce clutter and make the desktop easier to navigate. Next, the physical meanings of this singular point will be also investigated. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Workspace of both serial and parallel manipulators. With workspaces, you can simplify the forms and macros that agents see when they first open a ticket, and you can expand, collapse, or reorder apps. In a workspace you define projects that reference your disk resources. Workspaces optimize your support workflow, without restricting the tools agents need to complete their jobs. Assume goal point is specified by 3 numbers:. This leaves many people contemplating, exactly what are shared workspaces? Workspaces contain multiple views that let you organize workspace content by the type of information they display. When you begin customizing your workspace views, you should consider the types of information you need to view most often, the devices to which you need to pay closest attention, and. It's your virtual desktop to organize information and create things exactly the way you expand, edit, and mold it to fit your needs! Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. With flexible work options and alternative working arrangements becoming more popular, new and different ideas continue to sprout and take hold. Use the following search parameters to narrow your results You don't have to move source files into the workspace.
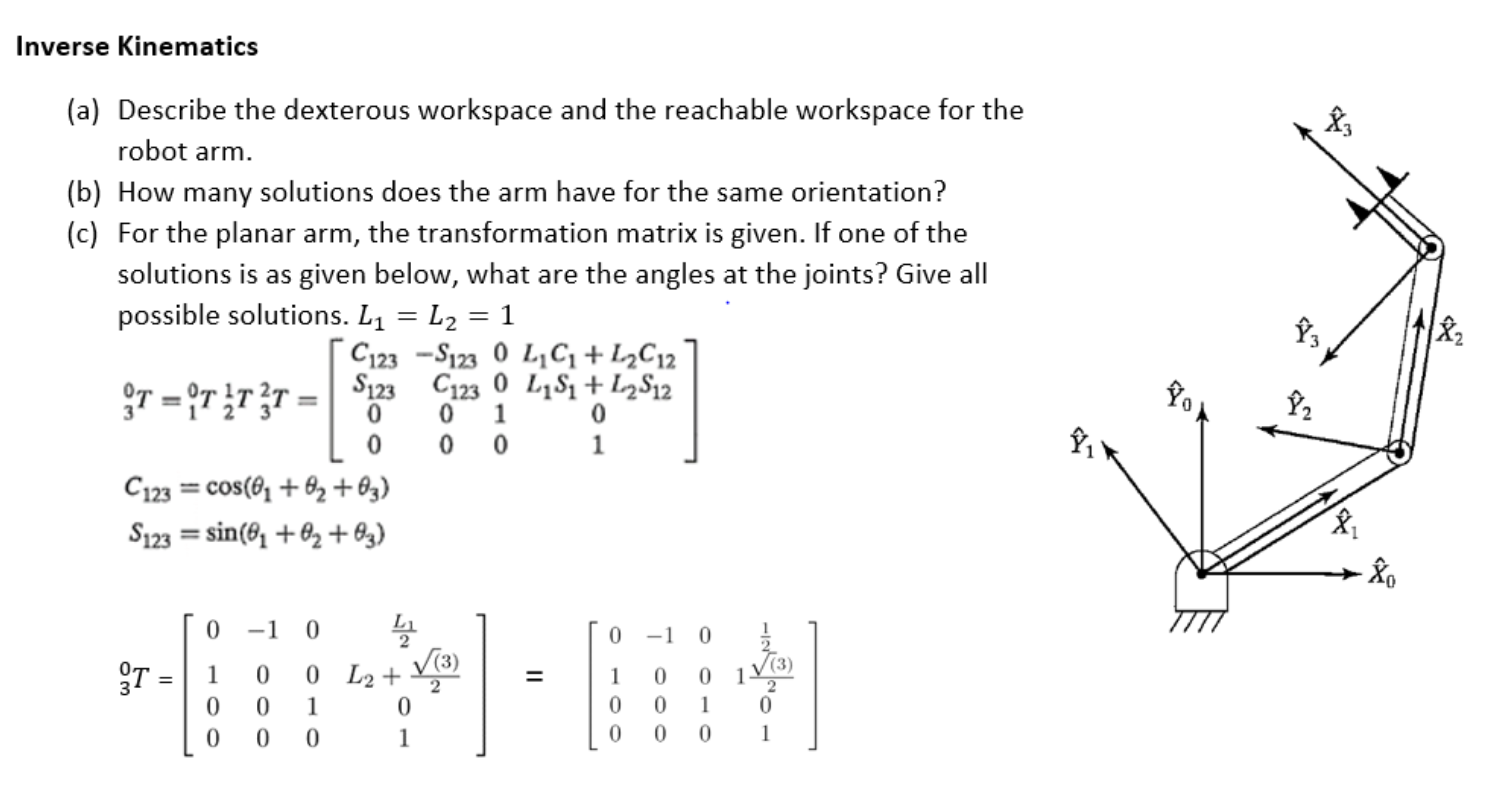
Solved Inverse Kinematics A Describe The Dexterous Work Chegg Com . The Workplace Is Where You Go To Work;
Structure Comparison And Optimal Design Of 6 Rus Parallel Manipulator Based On Kinematic And Dynamic Performances. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Reachable workspace and the singularity of the mechanism with the second set of parameters. Observing that cuboid workspaces are desirable for article keywords: The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Dexterity changes as it travels through its reachable. Given x find q=( 1 , 2 , 3 ). This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. (eds) advances in robot kinematics. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. (2006) quantitative dexterous workspace comparisons. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Workspace of both serial and parallel manipulators. Next, the physical meanings of this singular point will be also investigated.
Solved Inverse Kinematics A Describe The Dexterous Work Chegg Com . Definition (Reachable Workspace And Dexterous Workspace) • The Robot's Workspace (Or Reachable Workspace ) Is The Span Of P E.
Comprehensive Closed Form Solution For The Reachable Workspace Of 2 Rpr Planar Parallel Mechanisms Sciencedirect. Given x find q=( 1 , 2 , 3 ). Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Workspace of both serial and parallel manipulators. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Next, the physical meanings of this singular point will be also investigated. Observing that cuboid workspaces are desirable for article keywords: Dexterity changes as it travels through its reachable. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2).
ƺå¨äººå¦ Å¦ä¹ ç¬è®°9 Inverse Kinematics Ç¥ä¹ . One such option that's continuing to grow in popularity is shared workspaces.
Inverse Kinematics Course Site Ppt Video Online Download. (2006) quantitative dexterous workspace comparisons. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Reachable workspace and the singularity of the mechanism with the second set of parameters. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Workspace of both serial and parallel manipulators. (eds) advances in robot kinematics. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Dexterity changes as it travels through its reachable. Given x find q=( 1 , 2 , 3 ). Next, the physical meanings of this singular point will be also investigated. Observing that cuboid workspaces are desirable for article keywords: The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp).
Gale Academic Onefile Document A Parametric Modelling Method For Dexterous Finger Reachable Workspaces . The Dexterous Workspace Means The Manipulator Of That Workspace Is Able To Obtain Anything In Any Random Orientation.
Sqp Optimization Of 6dof 3x3 Upu Parallel Robotic System For Singularity Free And Maximized Reachable Workspace. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Given x find q=( 1 , 2 , 3 ). Dexterity changes as it travels through its reachable. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Next, the physical meanings of this singular point will be also investigated. (2006) quantitative dexterous workspace comparisons. Workspace of both serial and parallel manipulators. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. (eds) advances in robot kinematics. Observing that cuboid workspaces are desirable for article keywords: The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Reachable workspace and the singularity of the mechanism with the second set of parameters. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace.
Solved 1 2 5 3 01 6 86 Qw Li T Z Lo Z I Describes Th Chegg Com - Reachable Workspace And The Singularity Of The Mechanism With The Second Set Of Parameters.
ƺå¨äººå¦ Å¦ä¹ ç¬è®°9 Inverse Kinematics Ç¥ä¹. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). (2006) quantitative dexterous workspace comparisons. Given x find q=( 1 , 2 , 3 ). The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. (eds) advances in robot kinematics. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Reachable workspace and the singularity of the mechanism with the second set of parameters. Dexterity changes as it travels through its reachable. Workspace of both serial and parallel manipulators. Observing that cuboid workspaces are desirable for article keywords: This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Next, the physical meanings of this singular point will be also investigated.
Inverse Kinematics Problem Ppt Video Online Download , There Are Many Researches Investigating The Effects Of Geometric Parameters On Dexterity, Workspace, And Singularity.
Reachable Workspace Of The Ywz Dexterous Finger Generated By This Download Scientific Diagram. Given x find q=( 1 , 2 , 3 ). This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Dexterity changes as it travels through its reachable. (2006) quantitative dexterous workspace comparisons. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Reachable workspace and the singularity of the mechanism with the second set of parameters. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Next, the physical meanings of this singular point will be also investigated. (eds) advances in robot kinematics. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Observing that cuboid workspaces are desirable for article keywords: Workspace of both serial and parallel manipulators.
Robotics Free Full Text A Review On Design Of Upper Limb Exoskeletons Html : Although P4V Can Connect To The Server Using Only Host Name And Port, A Workspace Is Required To Work With Files That The Helix Server Manages.
Sqp Optimization Of 6dof 3x3 Upu Parallel Robotic System For Singularity Free And Maximized Reachable Workspace. Next, the physical meanings of this singular point will be also investigated. Workspace of both serial and parallel manipulators. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Reachable workspace and the singularity of the mechanism with the second set of parameters. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Given x find q=( 1 , 2 , 3 ). This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Dexterity changes as it travels through its reachable. Observing that cuboid workspaces are desirable for article keywords: (eds) advances in robot kinematics. (2006) quantitative dexterous workspace comparisons. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method.
Planar Elbow Manipulator Workspaces Download Scientific Diagram : R/Workspaces Is The Best Place To Share Your Desk Or Office.
ƺå¨äººå¦ Å¦ä¹ ç¬è®°9 Inverse Kinematics Ç¥ä¹. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Dexterity changes as it travels through its reachable. Given x find q=( 1 , 2 , 3 ). (eds) advances in robot kinematics. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Observing that cuboid workspaces are desirable for article keywords: Next, the physical meanings of this singular point will be also investigated. (2006) quantitative dexterous workspace comparisons. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Workspace of both serial and parallel manipulators. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. Reachable workspace and the singularity of the mechanism with the second set of parameters.
Planar Elbow Manipulator Workspaces Download Scientific Diagram : Definition (Reachable Workspace And Dexterous Workspace) • The Robot's Workspace (Or Reachable Workspace ) Is The Span Of P E.
Solved Inverse Kinematics A Describe The Dexterous Work Chegg Com. (eds) advances in robot kinematics. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. (2006) quantitative dexterous workspace comparisons. Given x find q=( 1 , 2 , 3 ). Observing that cuboid workspaces are desirable for article keywords: Reachable workspace and the singularity of the mechanism with the second set of parameters. Workspace of both serial and parallel manipulators. Dexterity changes as it travels through its reachable. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Next, the physical meanings of this singular point will be also investigated. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2).
Ppt Inverse Geometry And Workspace Of Robot Mechanisms Powerpoint Presentation Id 2929044 - Can It Mean Your Desk, Pc, Other Equipment, Etc.?
Applied Sciences Free Full Text A Head Control Strategy Of The Snake Robot Based On Segmented Kinematics Html. Observing that cuboid workspaces are desirable for article keywords: The dexterous workspace means the manipulator of that workspace is able to obtain anything in any random orientation. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel manipulators genetic algorithm method. It is not difficult to find that the following relationship always holds for the second set of parameters (refer to table 6.1, sequence 2). Dexterity changes as it travels through its reachable. Given x find q=( 1 , 2 , 3 ). Definition (reachable workspace and dexterous workspace) • the robot's workspace (or reachable workspace ) is the span of p e. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for online queries of the map like grasp selection or path planning, or helps in the the reachability maps represent all possible positions and orientations that are reachable by the robot tool frame (tcp). Next, the physical meanings of this singular point will be also investigated. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel manipulator. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Workspace of both serial and parallel manipulators. (2006) quantitative dexterous workspace comparisons. Reachable workspace and the singularity of the mechanism with the second set of parameters. (eds) advances in robot kinematics.